Touchscreen Operating Robot
The main purpose of Emile3: operating touch screen
Parameter Value Description
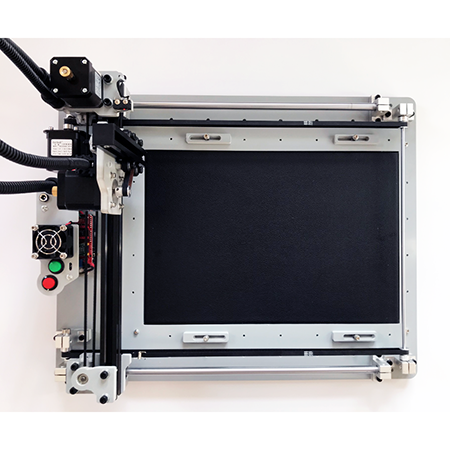
Three axis X Y Z straight line Gantry structure
Positioning method Space coordinates XYZ
Machine outline L490 * W390 * H200mm
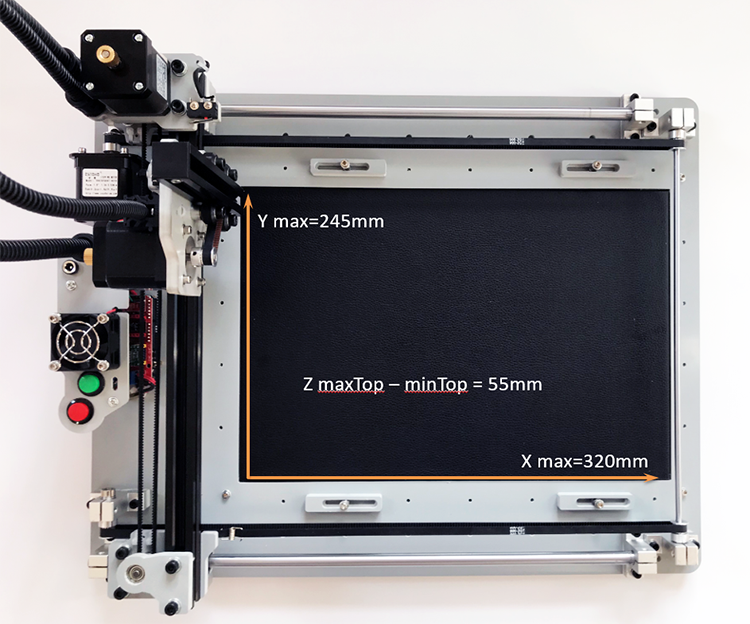
Movement stroke X: 320mm Y: 245mm Z: 55mm
Maximum single axis running speed 15000mm/s
The minimum ground clearance of the structure is 35mm. Measured from the machine pallet. The pallet can be removed to achieve a higher clearance in a hollow manner
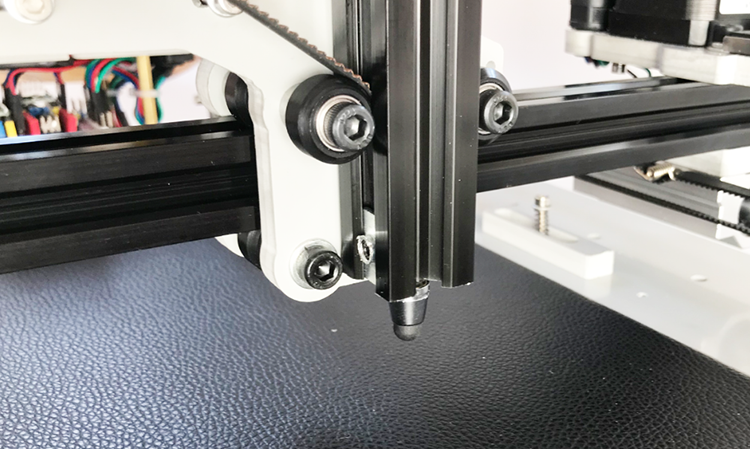
Z axis end maximum ground distance 50mm
Round trip accuracy 0.1mm
Z-axis protection
Power peak 72W, working environment 12V, 5V with 12V power supply, 5V from computer
Computer GRBL code control G code output control
Firmware open source GRBL controller board
Emile3 is connected to the computer through USB connection, install arduino driver
Control method: G code control/GRBL
Control hardware Arduino uno R3
Stepper driver A4988
Machine weight 6.1kg
Package size and weight 60 * 50 * 27cm
Net weight 8kg