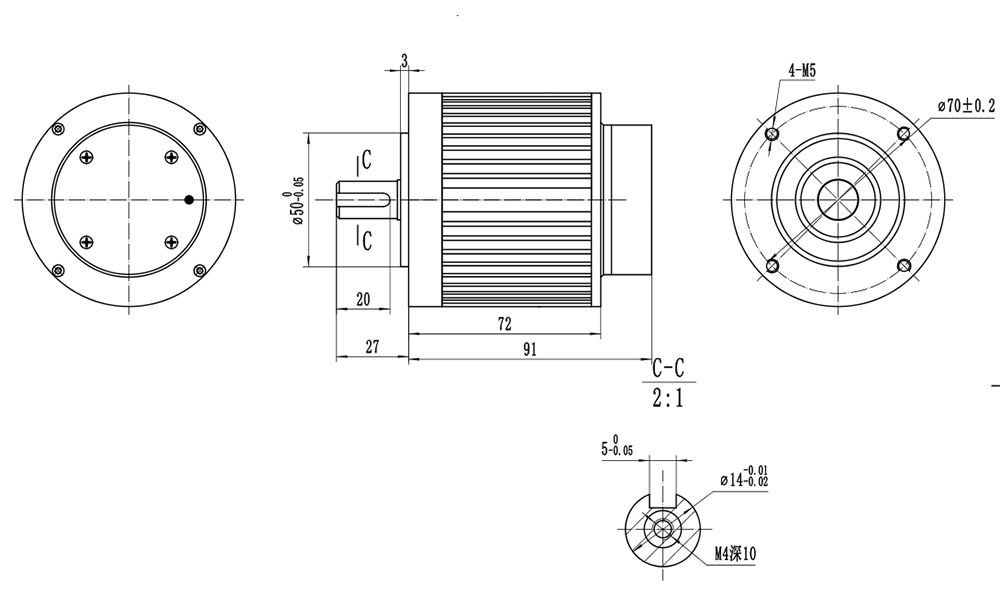
BLDC Servo Motor RS485 protocol
1. 15-bit absolute encoder, one turn pulse up to 32768.
2. Multiple absolute values, maximum record 65535 turns. (battery power supply needed). Pulse mode, power on automatically to power off position. Communication mode, power off the position can be recorded.
3. Multi-stage DD motor structure, large torque output.
4. Integrated servo, to simplify the wiring, small volume.
5. Low noise, low vibration, high-speed positioning, high reliability.
6. FOC field-oriented vector control, support position/velocity closed-loop.
7. Can work in the zero-lag given pulse state, following the zero lag.
8. 16-bit electronic gear function.
9. Modbus RTU communication (19200, 8, N, 1)
10. Position mode, support pulse+direction signal
11. With block detection, over-current protection, overpressure protection.

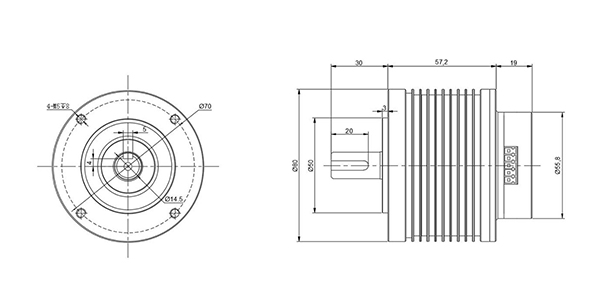
CANBus protocol BLDC Servo Motor
1. Isolated CAN communication(EasyCAN agreement, easy, quick to use, speed 1M). Support contour position mode, and cycle synchronization mode.
2.15-bit absolute encoder, one turn pulse up to 32768.
3. Multiple absolute values (battery needed). Pulse mode, power on automatically trace to power off position. Communication mode, power off position can be recorded.
4. Multi-stage DD motor structure, large torque output.
5. Integrated servo, to simplify the wiring, small volume.
6.Low noise,low vibration,high-speed positioning,high reliability.
7. FOC field-oriented vector control, support position/velocity closed-loop.
8. Can work in the zero-lag given pulse state, follow the zero lag.
9.16-bit electronic gear function.
10. Provide a serial port upper computer, which can monitor the state of the motor and modify the parameters.
11.position mode,support pulse+direction signal,encoder following.
12. Speed mode, supports PWM duty cycle signal speed adjustment.
13. With stuck detection, over current protection, overpressure protection.