Dual modes stepper controller
Pulse n Direction or Internal Pulse on board POT control (potentiometer) optional
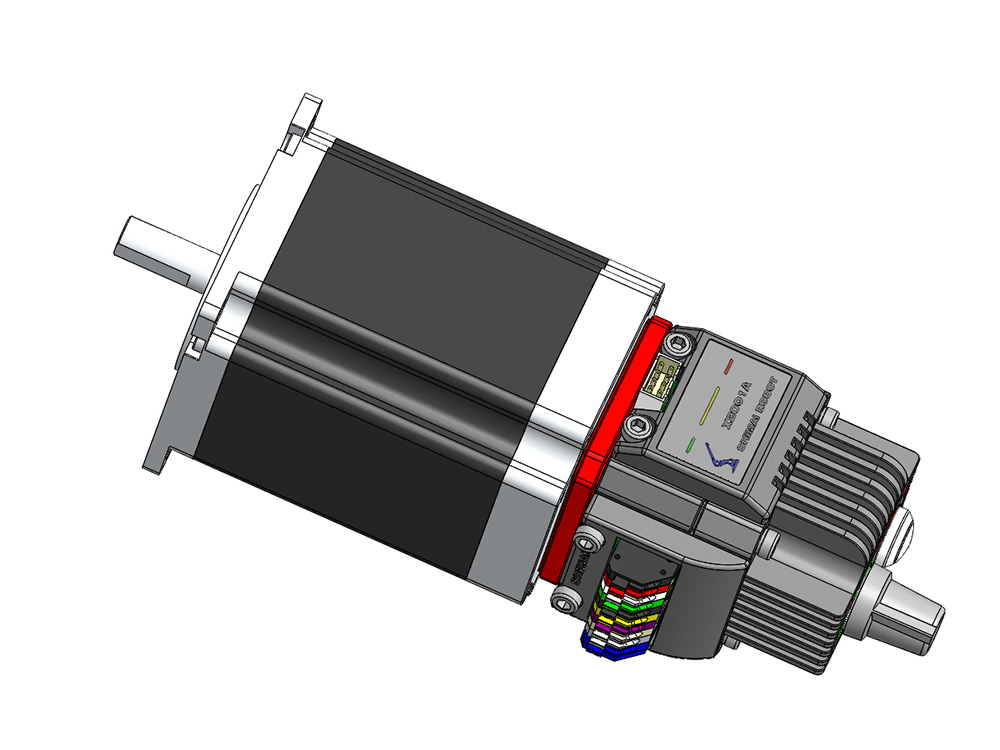
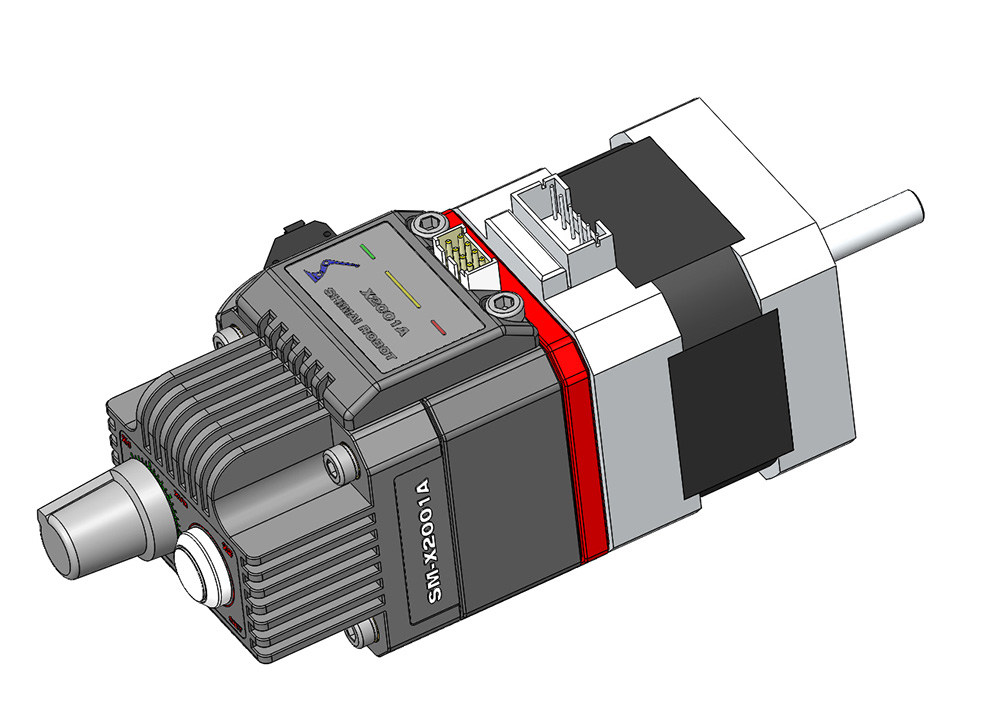
Shimai Robot stepper controller is divided into open loop and closed-loop types. The main application is stepper motor linear actuator, stepper motor linear cylinder, stepper motorized linear stage, metering peristaltic pump, special motion control module and other applications. The stepper controller has buttons and digital user interface. Internal parameters can be set without an external physical switch.
The external drive can use the external pulse as the traditional drive Pulse and Direction mode, or it can use the internal pulse function to realize the displacement control and speed control Potentiometer (POT) on board. If the closed-loop drive is used, the drive will handle the displacement or protection after the stall.
Parameters:
2.1 working voltage: DC24V
2.2 drive current: 0.5A~3A, (maximum allowable setting of 2.5A optional)
2.3 quiescent current: 0.5~2.5A (enable current when the drive is at rest when using internal pulse)
2.4 stepping subdivision: 2, 4, 8, 16, 32 (user can set)
2.5 speed range: 50K (potentiometer speed limit, external pulse mode is not limited)
2.6 Closed loop resolution: 1000 line encoder. (Not Applicable)
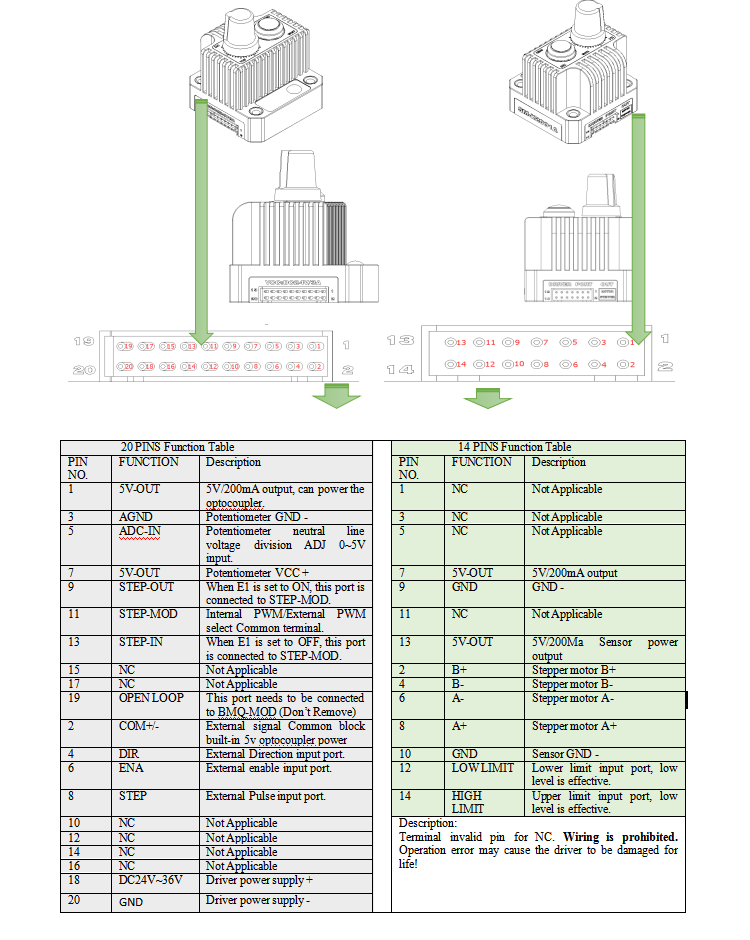
2.7 Output port: fault signal output, stop signal output (collector open drain output)
2.8 Limit interface: upper limit, lower limit or origin sensor.
2.9 External input: direction, enable, pulse, bidirectional optical input, pulse maximum frequency 150Kbps, 5V level.
2.0.1 Communication: CANbus 2.0 communication (requires customization)