




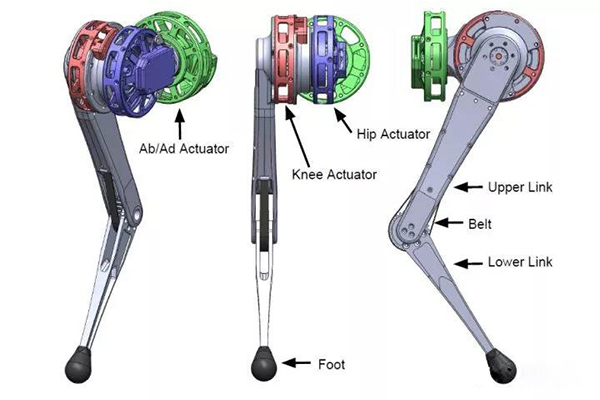
Joint motor for Boston Dynamics Robot Dog
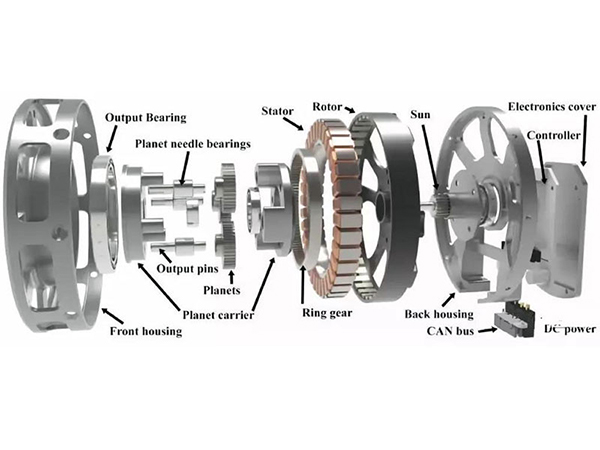
Motor + driver + encoder + reducer + CAN bus communication
High torque joint motor for Robot Dog or robot arm
Modular Actuator Documents
https://grabcad.com/library/mit-open-source-joint-motor-or-dd-motor-1
HT-03-MIT
Weight: 610g
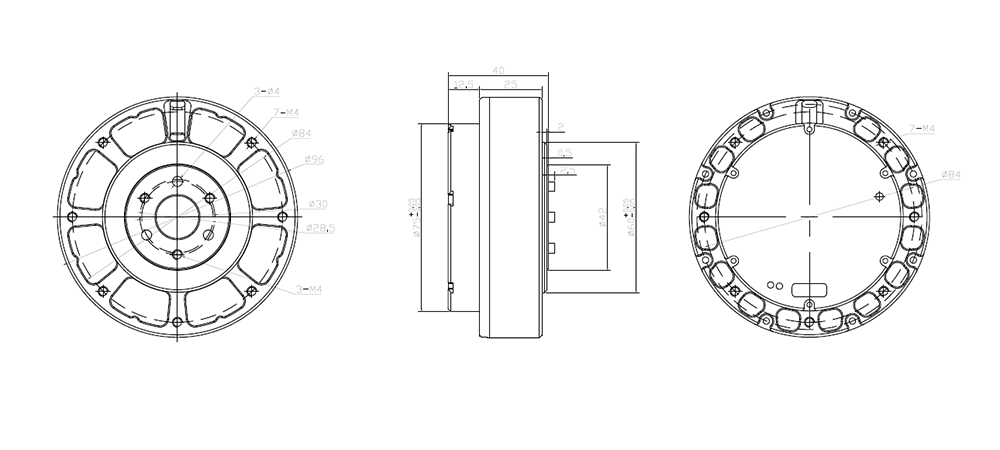
Dimensions: 96mm O.D., 40mm axial length
Maximum torque 17N.m
Continuous torque 6.9N.m (gear ratio 6:1)
Maximum output speed 40rad/s @24V
Maximum output power 250 watts
Current control bandwidth 4.5kHz @4.5N.m, 1.5kHz @17N.m
Output inertia 0.0023kgm2
HT-04-MIT
Cheetah Motor the latest version documents on Google Drive
https://drive.google.com/file/d/1ZLNZA8lIxulDlaiJsqZMKaBF2updOeZf/view?usp=sharing
Weight: 720g
Dimensions: 96mm O.D., 40mm axial length
Maximum torque 35N.m
Continuous torque 13N.m (gear ratio 6:1)
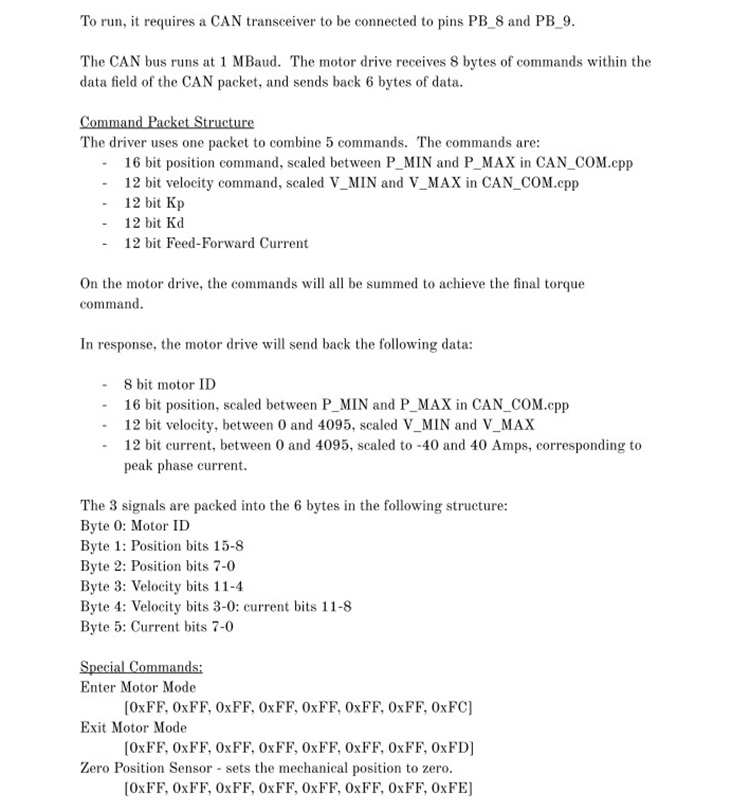
Communication protocol: CANBus
Connector: XT30/GH1.25
Power supply: 24-48V DC
12-bit encoder 0.087-degree precision
Control mode: torque loop, speed loop, and position loop
The robot joint motor has been upgraded to HT-02, HT-02-M part number for motor only and HT-02RDG with built-in driver
Communication CAN, (SmartCan protocol, Rate 1M);
15-bit absolute encoder, one circle pulse can up to 32768.
Multipole DD motor with high torque output.
Integrated servo motor with small size and easy-to-connect wires.
Position control pattern, you can set speed and acceleration
Power Supply 36VDC±10%
Rated Current 7A
Torque 1.27N.m (without gear)
Rated speed 1500RPM
Max speed 2000RPM
Power wattage 200W
Cooling mode natural cooling
English CAN Communication materials
https://drive.google.com/file/d/1gSgAaHF1gJnS8SFqn8_bAFIElDGFb9hp/view?usp=sharing
A complete unit of Cheetahs are available, the lead time is 3-5 weeks, Linux, C/C++
RobotDogg Basic, Color Gray
Can carry 2Kgs, speed forward 1.7m/s, lateral 0.6m/s, climbing angle 15 degrees, battery 5Ah endurance 1 hour, jumping max 20cm and distance 50cm, No camera
Gait: Trot, Flying Trot, Pace, Gallop, Bound

RobotDogg-EN Enhannced Version
Can carry 3Kgs, speed forward 2.5m/s, lateral 1m/s, climbing angle 30 degrees, battery 5Ah endurance 1.5 hours, jumping max 30cm and distance 80cm, deep camera Intel RealSense D435, Vision GPU NVIDIA Jetson Nano TX2
Gait: Trot, Flying Trot, Pace, Gallop, Bound, and other developments.








