Open source software Marlin controllable 4-axis SCARA
Please note: The price is only for Scara ontology which is assembled, stepper motors are included.
Controller, stepper driver and power supply is Not provided.
ABB, arduino robot, 7bot, dobot, uarm or mearm
Control system for demonstration recommendation: Marlin open source code + Arduino MEGA 2560 + TB6560 stepper drivers, 24V 240W power supply is recommended
MEGA 2560 is Not powerful enough for Linear or Arc Interpolation and you may try ARM32 OR STM32 as the upper control unit for second development.
SCARA Details
Power: all four-axis are used 42 stepper motor
Working Load: 2Kgs includes the actuator
Rotation range
Arm rotation 360 °
Arm rotation 0 ° ~ 290 °
Wrist rotation 360 ° +
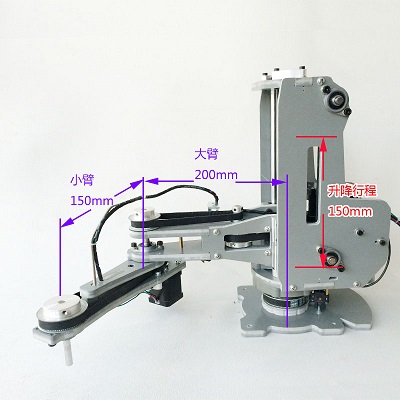
Arm long arm: 200mm
Small arm: 150mm
Z-axis lift 0 ~ 150mm
Material The main sheet: PVC engineering plastic
Weight of full set of arms: 7.5kg
The outer dimension is 500mm long * 180mm wide * 350mm high
42 stepper motor parameters:
Model: 42BYGH47-401A two hybrid stepping motor
Maximum drive current: 1.5A
Driving voltage: 2
Number of leads: 4
Step angle: 1.8 degrees
Surface temperature: 80 ℃ MAX (rated current)
Maximum static moment: 0.55N.M Phase resistance: 1.6Ω
Red, blue as a group, black and green as a group


Q & A?
Could it be modified to a larger range? What's the accuracy if the arm part is extend?
The below picture in Blue frame: To extend the arm part, the extension will weaken the arm motor braking capacity and start-up capacity,the load will be reduced to ensure performance, accuracy will be reduced too. Round trip accuracy: +-2mm

Waist photoelectric switch parameters Model: PM-K44

Does it come with controller and firmware already installed?What controller does it have?
The current product is not configured controller, just the arm part of the robot.
Scara controller selection has two kinds of ideas: one is to do the trial control (with four-axis engraving machine controller), suitable for point-to-point movement between, but the point between the path can not be planned (straight Or the provisions of the curve); the other is to do the movement trajectory control, the current foreign open source marlin 3D print source.
Recommended users in the marlin source code to make changes
Marlin control source I have not debugged, I attach one for your ref.
At present this model is same as 3d printing idea, such as print house or do cake graphics, pancakes, chocolate, but not extrude pla.
Marlin-for-Scara-Arm-Development:https://github.com/MarlinFirmware/Marlin
Marlin's software supports a variety of structures:

Scara has a series in parallel, and our structure belongs to the series
There is also a way to control the system with the engraving machine, the coordinates of the space to do the G code with the software converted to the angle of the G code. The below Video is using this software to convert the G code, with an offline four-axis engraver controller control.







